
| äōØ╔ÖCŲ„╚╦ |
| CHUANGZE ROBOT |
ÖCŲ„╚╦═©▀^╩š╝»┤¾┴┐ė|ėXöĄō■üĒūRäe╬’¾wĄ─ĘĮĘ©┤µį┌ę╗Č©Ą─Ž▐ųŲĪŻę╗ĘĮ├µÖCŲ„╚╦ė|ėXé„ĖąŲ„╩š╝»┤¾┴┐╬’¾wĄ─ė|ėXöĄō■▀^│╠┘Yį┤║─┘M┤¾Ż¼┴Ēę╗ĘĮ├µ╚š│Ż╔·╗Ņ─▄Įėė|ĄĮĄ─╬’¾wĘNŅɲŗ┤¾ĪŻĮ³Ų┌į┌IEEE TRANSACTIONS ON INDUSTRIAL INFORMATICS░l▒ĒĄ─ę╗Ų¬ĪČA Deep Learning Framework forTactile Recognition of Known as Well as Novel ObjectsĪĘ╬─š┬ųą╠ß│÷┴╦ę╗ĘN╗∙ė┌ŠĒĘe╔±ĮøŠWĮjĄ─ŠC║Žė|ėXūRäe┐“╝▄Ż¼╦³┐╔ęį└¹ė├ī”Ž¾Ą─šZ┴xī┘ąį├Ķ╩÷║═ė|ėXöĄō■Ą─╚┌║ŽüĒīŹ¼Fī”ą┬ī”Ž¾Ą─ūRäeĪŻŽÓī”ė┌é„ĮyīW┴ĢĘĮĘ©ėą▌^┤¾ā×ä▌Ż¼ę“×ķšZ┴xą┼ŽóĖ³╚▌ęū½@Ą├Ż¼┐╔ęįė╔╚╦╣ż[1]╠ß╣®Ż¼ę▓┐╔ęįÅ─šZ┴xöĄō■Äņ(╚ńWikipedia[2])ūįäė═┌Š“ĪŻ
1ĪóÖCŲ„╚╦ė|ėXūRäe┐é¾w┐“╝▄
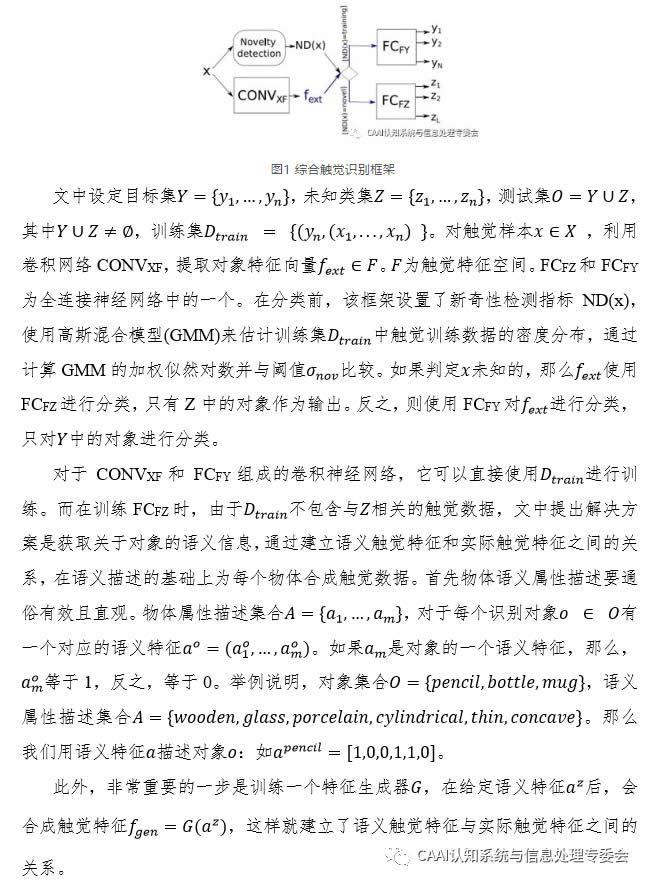
╬─ųąįOėŗĄ─┐é¾wūRäe┐“╝▄Ż¼╚ńłD1╦∙╩ŠĪŻ╩ūŽ╚Å─ė|ėXöĄō■│÷░lŻ¼┐╔ęįīóę╗éĆ╬’¾wūRäe×ķę╗éĆęčų¬Ą─╬’¾w(ų«Ū░Įėė|▀^Ą─)╗“ę╗éĆą┬Ą─╬’¾wĪŻęčų¬ī”Ž¾Ą─ūRäe╩Ū└¹ė├ė¢ŠÜöĄō■śŗĮ©Ą─ČÓŅÉĘųŅÉŲ„üĒīŹ¼FĄ─Ż¼Č°ą┬Ųµī”Ž¾Ą─ūRäeę└┘ćė┌╗∙ė┌ī┘ąįĄ─ZSLĘĮĘ©ĪŻ┤╦═ŌŻ¼═©▀^ę╗┤╬īW┴Ģ(one-shotlearning, OSL)Ż¼ų╗Å─ę╗éĆė¢ŠÜśė▒Šķ_╩╝Ż¼Š═┐╔ęįīŹ¼Fė|ėXöĄō■Ą─║Ž│╔ĪŻ
2. ╠žš„╔·│╔Ų„G
ė├ė¢ŠÜ╝»ė¢ŠÜę╗éĆ░³║¼CONVXF║═FCFYĄ─╔±ĮøŠWĮjCNNXYī”Y▀MąąĘųŅÉĪŻ└¹ė├šZ┴xī┘ąįŽ“┴┐ė¢ŠÜę╗éĆĘ┤ŠĒĘe╔±ĮøŠWĮjGüĒ║Ž│╔ė|ėX╠žš„ĪŻ×ķ╠ßG╠žš„╔·│╔Ų„GĄ─ŲĘ┘|Ż¼╩╣║Ž│╔Ą─ė|ėX╠žš„▒M┐╔─▄ĮėĮ³Å─šµīŹė|ėXöĄō■ųą╠ß╚ĪĄ─╠žš„ĪŻ╬─ųą╝ė╚ļ┴Ēę╗éĆŠĒĘe╔±ĮøŠWĮjDüĒī”┐╣ė¢ŠÜGŻ¼ŲõųąDė├üĒģ^Ęų║Ž│╔ė|ėX╠žš„╗“š▀šµīŹĄ─ė|ėX╠žš„ĪŻ└¹ė├ė¢ŠÜ║├Ą─GŻ¼║Ž│╔ė|ėX╠žš„ĪŻ
3. ŲĮ┼_┤ŅĮ©
╬─ųą╩╣ė├šZ┴xī┘ąį╝»:A ={╬³╩šąįĪó░╝═╣ąįĪó┐╔ē║┐sąįĪó└õ¤ßĪó─Ż║²ąįĪóė▓Ą─ĪóČÓ├½Ą─ĪóĮī┘Ą─ĪóČÓ┐ūĄ─Īó┤ų▓┌Ą─Īó╣Ō╗¼Ą─Īó╚ß▄øĄ─Īó╣╠¾wĄ─ĪóėąÅŚąįĄ─Īóر▄øĄ─Īóėą╝y└ĒĄ─Īó║±Ą─}ĪŻ╩╣ė├╣½ķ_Ą─PHAC-2öĄō■╝»Ż¼įōöĄō■╝»░³║¼60ĘN╬’¾w├┐ę╗ĘNČ╝į┌[4]ųą▀Mąą┴╦10┤╬įć“×ĪŻöĄō■═©▀^SynTouch BioTacė|ėXé„ĖąŲ„½@Ą├ĪŻī”BioTacūxöĄ▀MąąŅA╠Ä└ĒŻ¼▓ó░┤šš[5]ųą╩╣ė├BioTacūxöĄī”Aųą░³║¼Ą─ī┘ąį▀MąąČ■į¬ĘųŅÉŻ¼½@Ą├┴╦ę╗éĆė╔6000éĆśė▒ŠĮM│╔Ą─įŁ╩╝ė|ėXöĄō■╝»(60ĘN╬’¾w├┐ĘN10éĆśė▒Š▀Mąą10┤╬įć“×)ĪŻ
╬─ųąļSÖC▀xō±6éĆī”Ž¾ū„×ķZŻ¼54éĆū„×ķYŻ¼×ķ┴╦┤_▒ŻŽĄĮyī”Y║═Z▀xō±Š▀ėą¶ö░¶ąįŻ¼▀@éĆļSÖC▀^│╠ųžÅ═┴╦Ų▀┤╬ęį╔·│╔▓╗═¼Ą─Z║═YĪŻ▒Ē1×ķ╬─ųą╩╣ė├Ą─ŠWĮj╝▄śŗĪŻFCFY║═FCFZČ╝╩Ūå╬īė╚½▀BĮėŠWĮjĪŻį┌ŠĒĘeīėų«║¾╩Ūßśī”ĘŪŠĆąįĄ─ReLU╝ż╗Ņ║»öĄĪŻŠĒĘeīė║═╚½▀BĮėīėĄ─ÖÓųĄČ╝╩╣ė├XavierĘĮĘ©[6]▀Mąą│§╩╝╗»Ż¼╦∙ėąĘ┤ŠĒĘeīėČ╝╩╣ė├Gaussian│§╩╝╗»Ų„▀Mąą│§╩╝╗»ĪŻ╬─ųąė├softmax║»öĄ║═ČÓĒŚ╩Į▀ē▌ŗōp╩¦ė¢ŠÜ═Ļ╚½▀BĮėīėŻ¼ė├Į╗▓µņžōp╩¦ė¢ŠÜDĪŻ
4. īŹ“×įu╣└
1Ż®─┐ś╦ĘųŅÉ
łD2Įo│÷┴╦PHAC-2ī”Ž¾╝░Ųõī┘ąįĄ─└²ūėŻ¼ęį╝░split 1Ą─£yįćī”Ž¾ĪŻļm╚╗£yįćī”Ž¾(ė├╦{╔½┐“ŲüĒ)į┌šZ┴x╔Ž┼cė¢ŠÜī”Ž¾▓╗═¼Ż¼Ą½╩Ū▀@ā╔éĆ╝»║Ž╣▓ŽĒŽÓ═¼Ą─ī┘ąįŻ¼├┐éĆ£yįćī”Ž¾Č╝ėąģ^äeė┌Ųõ╦¹ī”Ž¾Ą─ī┘ąįŽ“┴┐ĪŻ“×ūC┴╦Z║═Yų«ķgĄ─╣▓ŽĒī┘ąįŻ¼“×ūC┴╦ųą├┐éĆī”Ž¾Ą─ī┘ąįŽ“┴┐Ą─ąįŻ¼Å─Č°į╩įS╩╣ė├╬─ųą┐“╝▄üĒł╠ąąZSLĪŻ
łD2 PHAC-2ī”Ž¾╝░Ųõī┘ąį╩Š└²
2Ż®ęčų¬ī”Ž¾Ą─ČÓųžĘųŅÉ
Å─├┐éĆųąļSÖC▀x╚Ī10éĆśė▒Šū„×ķ£yįćöĄō■Ż¼╩ŻŽ┬Ą─90éĆśė▒Šė├ė┌ė¢ŠÜCNNXYĪŻ▒Ē2▒Ē╩Š┴╦įō┐“╝▄▀_ĄĮĄ─ūRäeŠ½Č╚ĪŻ╬ęéā┐╔ęį┐┤ĄĮŻ¼ūRäeŠ½Č╚╩ŪĘŪ│ŻGĄ─ĪŻ▀@éĆĮY╣¹║▄ųžę¬Ż¼ę“×ķ╦³ė░Ēæ┴╦CONVXFĄ─ė¢ŠÜŻ¼Å─Č°ę▓ė░Ēæ┴╦ī”ą┬ī”Ž¾Ą─ūRäeĪŻ
▒Ē2 Ą─ČÓŅÉĘųŅÉĄ─ūRäeŠ½Č╚(%)
3Ż®║Ž│╔ė|ėX╠žš„Ą─įu╣└
╚ń╣¹╚▒╔┘šµīŹĄ─ė¢ŠÜöĄō■Ż¼ät└¹ė├║Ž│╔Ą─╠žš„üĒė¢ŠÜūRäeŽĄĮyĪŻę“┤╦Ż¼┐╔ęįå╬¬Ü╩╣ė├║Ž│╔╠žš„ī”┐“╝▄▀Mąąė¢ŠÜ▓ó╩╣ė├šµīŹ╠žš„▀Mąą£yįćŻ¼ęį╬┤ų¬─┐ś╦ūRäeĄ─£╩┤_ąį│╠Č╚üĒįu╣└║Ž│╔ė|ėX╠žš„Ą─┘|┴┐ĪŻį┌▒Ē3ųąŻ¼£yįć┴╦į┌╩╣ė├šµīŹė|ėX╠žš„║═╩╣ė├║Ž│╔ė|ėX╠žš„╠µ┤·šµīŹė|ėX╠žš„▀@ā╔ĘNŪķørŽ┬Ż¼ŽĄĮyĄ─ūRäe▒Ē¼FĪŻ
▒Ē3 ╩╣ė├├┐éĆŅÉ0Īó10Īó50Īó90╗“100éĆśė▒Šė¢ŠÜFCFZ║¾Ż¼ČÓŅÉĘųŅÉ(šµīŹė|ėX╠žš„ė¢ŠÜ)║═ZSL(║Ž│╔ė|ėX╠žš„)Ą─ūRäe£╩┤_┬╩(%)
Å─▒Ē4ųą║▄├„’@┐┤ĄĮŻ¼╩╣ė├šµīŹė|ėX╠žš„▀Mąąė¢ŠÜĄ─ą¦╣¹├„’@ā×ė┌║Ž│╔ė|ėX╠žš„ė¢ŠÜĪŻĄ½╩ŪŻ¼į┌ø]ėąšµīŹė|ėXą┼Žó┐╔ė├Ą─ŪķørŽ┬Ż¼ČÓŅÉĘųŅÉŲ„╩Ū¤oĘ©ģ^Ęųī”Ž¾Ą─Ż¼Ģ■░┤ŲĮŠ∙Ė┼┬╩▀MąąĘųŅÉĪŻ╚╗Č°Ż¼ī”ė┌╦∙ėąĄ─ī”Ž¾ĘųŅÉŻ¼ZSLģs┐╔ęįĮo│÷ę╗éĆGė┌Ė┼┬╩Ą─ĘųŅÉŠ½Č╚ĪŻ▀ĆėąŻ¼į÷╝ėė¢ŠÜĄ─║Ž│╔ė|ėX╠žš„śė▒ŠöĄ┴┐▓ó▓╗Ģ■╠ßG£╩┤_Č╚Ż¼▀@┐╔─▄╩Ūę“×ķ├┐éĆŅÉĄ─║Ž│╔ė|ėX╠žš„Č╝╩Ūė╔ŽÓ═¼Ą─ī┘ąįŽ“┴┐Ż©═©▀^╠Ē╝ė╔┘┴┐Ą─įļ┬ĢŻ®║Ž│╔Ą─Ż¼▀@ĘNŽÓ╦ŲąįŻ¼×ķę╗éĆī”Ž¾╔·│╔ČÓéĆ╠žš„Ģ■ī¦ų┬▀^öM║ŽĪŻ╬─ųą▀ĆĘų╬÷┴╦╩╣ė├ī”┐╣╔±ĮøŠWĮjĄ─▒žę¬ąįŻ¼╚ń╣¹╠°▀^╦ŃĘ©2║═āH╩╣ė├╦ŃĘ©1ė¢ŠÜ╔·│╔Ų„Ż¼─Ū├┤ŽĄĮyąį─▄Ģ■Ž┬ĮĄŻ¼▀@╩Ūę“×ķ║Ž│╔Ą─ė|ėXöĄō■┼cšµīŹė|ėXöĄō■ėą▌^┤¾▓ŅäeĪŻ
▒Ē4ėąGAN║═¤oGANĄ─ZSLūRäeŠ½Č╚(%)
5. ┐éĮY
▀@Ų¬šō╬─įOėŗ┴╦ę╗éĆė|ėXūRäe┐“╝▄Ż¼└¹ė├ė|ėXöĄō■─▄ē“ūRäeęčų¬║═╬┤ų¬ī”Ž¾ĪŻį┌ī”╬┤ų¬ī”Ž¾Ą─ūRäeĘųŅÉ╔ŽŻ¼Š½Č╚▀_ĄĮ36%Ż¼▀@╩Ūé„Įyė¢ŠÜ─Ż╩Į▀_▓╗ĄĮĄ─ĪŻ┤╦═Ō,įō┐“╝▄ėąą¦└¹ė├▌ö╚ļĄ─öĄō■Ż¼╚ń╣¹ėąūŃē“Ą─öĄō■┐╔ė├ĢrŻ¼┐╔ęį▀_ĄĮ▌^GĄ─ČÓŅÉĘųŅÉŠ½Č╚ĪŻįō┐“╝▄╚į╚╗┤µį┌ę╗ą®Ž▐ųŲŻ¼╩ūŽ╚Lė“ęŲ╬╗å¢Ņ}[7]║═šZ┴xī┘ąį┐šķg┼cė|ėX╠žš„┐šķgĄ─ŽÓĻPąįŽ▐ųŲ┴╦ī”ą┬ī”Ž¾Ą─ūRäeĪŻ┤╦═Ōįō┐“╝▄─▄ē“ūRäeĄ─ą┬ŅÉ╝»║ŽąĶę¬╩Ūęčų¬Ą─Ż¼╠Ē╝ėą┬ŅÉąĶꬹ▐Ė─FCFZĄ─▌ö│÷īėŻ¼═¼└Ē╠Ē╝ėą┬ī┘ąįąĶꬹ▐Ė─Ą─▌ö╚ļīėĪŻ┤╦═ŌŻ¼╬─ųą╩╣ė├┴╦ė╔[4]įOėŗĄ─šZ┴xČ■▀MųŲī┘ąįĪŻ╠ĮėæĘŪšZ┴xī┘ąį║═īŹųĄī┘ąį┐╔ęį╠ßG[8]Īó[9]ūRäeĄ─£╩┤_ąį║═Ę║╗»─▄┴”ĪŻ║¾Ż¼╬─ųąų╗Ė∙ō■ė|ėXöĄō■üĒūRäe╬’¾wŻ¼┐╔ęįĮY║ŽęĢėX▀Mę╗▓Į═žš╣Ż¼╚ńį┌[10]Ż¼[11]ĪŻ┐╝æ]ĄĮCNNį┌łDŽ±ūRäe║═╔·│╔[12]ĘĮ├µĄ─┴╝║├▒Ē¼FŻ¼ęĢė|ėX╚┌║ŽūRäe┐╔ęį’@ų°╠ßGūRäeąį─▄Ż¼▀@╩ŪĘŪ│ŻėąčąŠ┐ārųĄĄ─ĪŻ
 |
| ÖCŲ„╚╦šą╔╠ Disinfection Robot ÖCŲ„╚╦╣½╦Š ÖCŲ„╚╦æ¬ė├ ųŪ─▄ßt»¤ ╬’┬ōŠW ÖCŲ„╚╦┼┼├¹ ÖCŲ„╚╦Ų¾śI ÖCŲ„╚╦š■▓▀ Į╠ė²ÖCŲ„╚╦ ėŁ┘eÖCŲ„╚╦ ÖCŲ„╚╦ķ_░l ¬ÜĮŪ½F Ž¹ČŠÖCŲ„╚╦ŲĘ┼Ų Ž¹ČŠÖCŲ„╚╦ ║Ž└Ēė├╦Ä ĄžłD |


