

ÖCŲ„╚╦▀b▓┘ū„(Teleoperation)Ż¼ę▓┐╔ęįĘQ×ķTeleroboticsŻ¼╩ŪųĖį┌ŽÓĻPÖCŲ„╚╦┐žųŲųą░č╚╦ŅÉ▓┘ū„░³║¼į┌┐žųŲ╗ž┬ĘųąŻ¼╚╬║╬Ą─╔ŽīėęÄäØ║═šJų¬øQČ©Č╝╩Ūė╔╚╦ŅÉė├涎┬▀_Ż¼Č°ÖCŲ„╚╦▒Š¾wų╗╩Ūžōž¤ŽÓæ¬Ą─īŹ¾wæ¬ė├ĪŻ«öÖCŲ„╚╦╠Ä└ĒÅ═ļsĄ─Ėąų¬║═┤¾┴┐╚╬äšĢrŻ¼į┌┐ņ╦┘ū÷│÷øQ▓▀║═╠Ä└ĒśOČ╦ŪķørĢrŻ¼▀bŠÓ▓┘ū„▀h▀hā×ė┌ųŪ─▄ŠÄ│╠ĪŻ
─┐Ū░▀b▓┘ū„ęčÅVĘ║æ¬ė├į┌ßt»¤ŅIė“ĪóśOČ╦ŁhŠ│╠Į╦„╚ń╠½┐š┼c╔Ņ║Żł÷Š░ĪóĘ└┐ųĘ└▒¼æ¬ė├ł÷Š░Ż¼╝░╗∙ė┌╣żśIÖCąĄ▒█Ą─ūįäė╗»╔·«aųąĪŻÖCŲ„╚╦▀b▓┘ū„┐╔ęį┤¾ų┬Ęų×ķ╗∙ė┌įOéõĄ─Įėė|╩Į▀b▓┘ū„║═╗∙ė┌¤oś╦ėøĄ─ęĢėX▀b▓┘ū„ā╔┤¾ŅÉĪŻ2009─ĻęįŪ░Ą─╣żū„┐╔ęįģó┐╝[1]Ż¼Ž┬├µŠ═Į³Äū─ĻĄ─▀b▓┘ū„░lš╣▀MąąĮķĮBĪŻ▒Š╬─ų„ę¬ĻPūóĘ■äšÖCŲ„╚╦║═╣żśIÖCŲ„╚╦Ż¼▓╗╔µ╝░ßt»¤ÖCŲ„╚╦Ż¼╚ńī”ßt»¤ÖCŲ„╚╦Ėą┼d╚ż┐╔ģó┐╝[2]ĪŻ
ę╗ĪóĮėė|╩Į▀b▓┘ū„
Įėė|╩Į▀b▓┘ū„═©│Ż═©▀^▀b▓┘ū„š▀┤®┤„╗“▓┘ū„▓╗═¼ŅÉą═Ą─įOéõüĒīŹ¼FĪŻ▀@ą®įOéõėą▓┘ū„ŚUĪóŅÉ╚ńApriltagĄ─ś╦ėø╬’Ż¼æTąį£y┴┐å╬į¬IMUŻ¼╝ĪļŖłDŻ©EMGŻ®ą┼╠¢é„ĖąŲ„Ż¼╠ōöM¼FīŹVR/į÷ÅŖ¼FīŹARįOéõęį╝░Ū░Š░ÅVķ¤Ą─ė|ėXįOéõĄ╚ĪŻ
1. ╗∙ė┌IMU║═EMGĄ─▀b▓┘ū„
╗∙ė┌IMU║═EMGĄ─▀b▓┘ū„ĘĮĘ©│╔▒ŠĄ═ŪęĖ▀ą¦ęū▓┘ū„ĪŻ2017─ĻŻ¼ŪÕ╚A┤¾īWīOĖ╗┤║Į╠╩┌šnŅ}ĮMįOėŗ┴╦ę╗éĆ╝»│╔18éĆIMUĄ─┤®┤„╩ų╠ūŻ¼▓óķ_░l┴╦╗∙ė┌öUš╣┐©Ā¢┬³×V▓©Ų„Ą─ČÓ─ŻæB╚┌║Ž╦ŃĘ©ė├ė┌═Ų╦Ń╚╦╩ų▒█║═╩ųĄ─ĘĮŽ“┼c╬╗ų├[3]ĪŻ▀@ĘNą┬ĘfĄ─▀b┐žĘĮ░ĖĘĆČ©Ąžæ¬ė├ė┌ė╔SCHUNK╩ų▒█║═Barrett╚²ųĖ╩ųśŗ│╔Ą─11DOFÖCąĄ▒█-╩ųŽĄĮyŻ¼ęį╝░ė╔UR5║═Barrett╚²ųĖ╩ųśŗ│╔Ą─10DOFÖCąĄ▒█-╩ųŽĄĮyŻ¼Ųõųą▓┘ū„åTĄ─╩ųųĖė├ė┌ÖCąĄ╩ų▀b┐žŻ¼Č°╩ųšŲĄ─╩ų▒█ė├ė┌ÖCąĄ▒█▀b┐žĪŻ
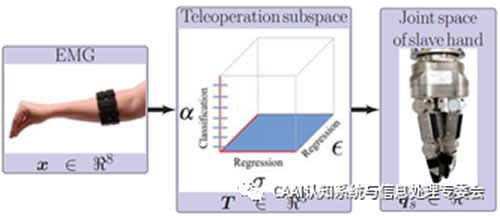
2019─ĻŻ¼ĖńéÉ▒╚üåłFĻĀ╠ß│÷┴╦ę╗ĘNė╔EMG“īäėĄ─ĘŪöM╚╦╗»ÖCŲ„╚╦╩ų▀b▓┘ū„ĘĮĘ©Ż¼▀@ĘNĘĮĘ©īó╚╦Ū░▒█Ą─EMGą┼╠¢▀B└mė│╔õ┼c▀h│╠▓┘ū„ŽÓĻPĄ─╚²éĆūė┐šķgųąŻ¼╚╗║¾į┘Å─▀@éĆūė┐šķgė│╔õĄĮÖCŲ„╚╦╩ųĄ─ĻP╣Ø┐šķg[4]ĪŻ▀@éĆĘĮĘ©ėąą¦Ūęų▒ė^Ż¼╩╣ą┬╩ų▓┘ū„š▀Ė³┐ņ╩ņŽż▓┘ū„ĘĮ░ĖŻ¼┐╔ęį¶ö░¶Ąž═Ļ│╔▀h│╠▓┘ū„╩░╚Ī║═Ę┼ų├╚╬äšĪŻ
2. ╗∙ė┌VR/ARĄ─▀b▓┘ū„
╗∙ė┌╠ōöM¼FīŹĄ─ÖCŲ„╚╦▀b▓┘ū„╩Ū┐╦Ę■ĢrčėĄ─ėąą¦ĘĮĘ©,Š▀ėą═Ė├„ąįÅŖĪóĘĆČ©ąįĖ▀Ą─ā׳c,│╔×ķ«öŪ░ÖCŲ„╚╦▀b▓┘ū„Ą─ų„ę¬ĘĮ╩ĮĪŻØh▒ż┤¾īWłFĻĀ╩╣ė├╬ó▄øhololens┤®┤„╩Įč█ńRŻ¼╗∙ė┌╗ņ║Ž¼FīŹŻ©MRŻ®╝╝ąg×ķ╚╦ÖCĮ╗╗źŻ©HRIŻ®ł÷Š░ķ_▒┘┴╦▀b▓┘ū„Ą─ą┬Ū░Š░[5]ĪŻį┌MR╚╦ÖCģfū„ŽĄĮyųąŻ¼▓┘ū„åT▓╗āH┐╔ęį┐┤ĄĮÖCŲ„╚╦Ą─šµīŹ╣żū„ł÷Š░Ż¼▓óŪęŲõ╦¹╠ōöMą┼Žó┐╔ęį»B╝ėį┌šµīŹł÷Š░Ą─ęĢłD╔ŽŻ¼īŹ¼Fų▒ė^ūį╚╗Ąž┐žųŲė├ė┌ūź╚Ī║═Ę┼ų├╚╬䚥─ÖCŲ„╚╦ĪŻ╠žäe╩Ūį┌ÖCŲ„╚╦ł╠ąąäėū„ų«Ū░Ż¼▓┘ū„åT┐╔ŅAė[ÖCŲ„╚╦Ą─Øōį┌ęÄäØäėū„Ż¼┐╔ęį£p╔┘ōpē─ŽĄĮy╗“é¹║”▓┘ū„╚╦åTĄ─’LļUĪŻ┤╦═ŌŻ¼ū„š▀ę▓į┌ČÓÖCŲ„╚╦ŽĄĮyĄ─Į╗ĖČĘ■äš╚╬äšųą“×ūC┴╦▀@éĆŽĄĮyĪŻ▀@ą®čąŠ┐×ķ╬┤üĒVRĪóAR╝░MRčbéõĄ─įOėŗ╝░╠ōöM¼FīŹį┌ÖCŲ„╚╦ĘĮŽ“╔ŽĄ─æ¬ė├╠ß╣®┴╦ųžę¬Ą─åó╩ŠĪŻ
3. ╚┌║Žė|ėXĘ┤üĄ─▀b▓┘ū„
ė|ėXĘ┤üī”ė┌Įėė|žSĖ╗Ą─═Ō▓┐▓┘ū„╚╬äšų┴ĻPųžę¬Ż¼ė|ėXįOéõęčį┌═Ō┐Ų╩ųągÖCŲ„╚╦ųąĄ├ĄĮÅVĘ║蹊┐Ż¼▓óė├ė┌į┌╠ōöM¼FīŹæ¬ė├│╠ą“ųą╩š╝»ė¢ŠÜöĄō■Ż¼╚ńHaptX development kitĪŻę╗ą®╔╠śI«aŲĘCyberGloveĪóHaptXęį╬’└ĒūĶ┴”║═┐šķgĮėė|Ą─ą╬╩Į╠ß╣®┴╦ė|ėXĘ┤üŻ¼Ą½╩Ū▀@ĘN║├╠Ä░ķļSų°│╔▒ŠĄ─į÷╝ėĪŻHaptX┼cConverge Robotics GroupŻ©ė╔ć°ļH╣½╦ŠĮM│╔Ą─žöłFŻ®╣▓═¼ķ_░l┴╦TactileTelerobot▀h│╠ÖCŲ„╚╦Ż¼ęį═Ųäėė|ėX║═ÖCŲ„╚╦╝╝ągĄ─░lš╣ [6]ĪŻTactileTelerobot╩Ū╩└Įń╔ŽĄ┌ę╗éĆ─▄ē“īó▒ŲšµĄ─ė|├■Ę┤üé„▌öĮo╬╗ė┌╩└ĮńĖ„ĄžĄ─▓┘ū„åTĄ─ÖCŲ„╚╦ŽĄĮyŻ¼įōŽĄĮy╝»│╔┴╦╚²éĆų„ꬫaŲĘŻ¼├┐éĆų„ꬫaŲĘČ╝į┌ŲõŅÉäeųą╠Äė┌ŅIŽ╚Ąž╬╗Ż║Shadow Robot HandsŻ¼SynTouch BioTacé„ĖąŲ„║═HaptX GlovesĪŻTactile Telerobot═©▀^šµīŹ¤očė▀tĄ─ė|ėXĘ┤üīŹ¼F┴╦ČÓĘNÖCąĄ╩ųņ`Ū╔▓┘ū„Ż¼╚ńĄ╣╦«ĪóöQŲ┐╔wĪó▐D─¦ĘĮĪóīæūųĪóķ_╝ł║ąĪóÄ═╚╦ĦȷÖCŻ¼╔§ų┴╚╦¾w░┤─”Ą╚ĪŻ
«ö╚╗▀@ĘN░║┘FĄ─ė|ėXįOéõ▓ó▓╗╩Ū├┐éĆĮMČ╝┐╔ęįōĒėąŻ¼ę“┤╦▀Ćėąę╗ą®ļpŽ“▀b▓┘ū„┐žųŲįOéõį┌[7]ųąŻ¼═©▀^Č©┴xę╗éĆ╠ōöMĄ─▓┘ū„ī”Ž¾üĒ▓Č½@į┌masteré╚╚╦╩ųĄ─▀\äė╝░slaceé╚ŽÓĻPĄ─┴”Ę┤üĪŻ

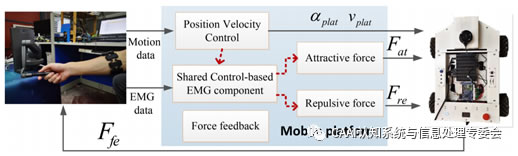
│²┴╦╩╣ė├▀b▓┘ū„╝╝ągī”ÖCąĄ▒█╗“š▀ÖCŲ„╩ųĄ─┐žųŲŻ¼2020─Ļ╬„ėóĖ±╠m┤¾īWĄ─ŚŅ│Į╣ŌłFĻĀ╠ß│÷┴╦ę╗ĘNė├ė┌╚½Ž“ęŲäėÖCŲ„╚╦Ą─EMG┼cė|ėXįOéõ╗ņ║Ž┐žųŲĘĮĘ©[8]ĪŻ▀@ĘN╗ņ║Ž╣▓ŽĒ┐žųŲĘĮĘ©╗∙ė┌╝ĪļŖłD║═╚╦╣żä▌ł÷Ż¼ė├ęįĖ∙ō■┼┼│Ō┴”║═╬³ę²┴”▒▄ķ_šŽĄK╬’Ż¼▓ó╗∙ė┌ęŲäėŲĮ┼_Ą─┴”Ę┤üį÷ÅŖ╚╦ŅÉī”▀h│╠ŁhŠ│Ą─Ėąų¬ĪŻ▀@ĘN╣▓ŽĒ┐žųŲĘĮĘ©╩╣▀b▓┘ū„š▀▀h│╠┐žųŲęŲäėÖCŲ„╚╦Ą─▀\äė▓ó═¼▓ĮīŹ¼F▒▄šŽĪŻ┼cé„ĮyĄ─╣▓ŽĒ┐žųŲĘĮĘ©ŽÓ▒╚Ż¼įō╠ßūhĄ─ĘĮĘ©╠ß╣®┴╦╗∙ė┌╝Ī╚Ō╝ż╗ŅĄ─┴”Ę┤üŻ¼▓ó“īäė▓┘ū„š▀ęį┐╔ŅA£yĄ─ĘĮ╩ĮĖ³ą┬Ųõ┐žųŲęŌłDĪŻūŅĮK═©▀^Ė„ĘN▒▄šŽīŹ“×▒Ē├„▀@ĘN▀b┐žĘĮĘ©ī”ęŲäėÖCŲ„╚╦┐žųŲĄ─ėąą¦ąįĪŻ
Č■Īó╗∙ė┌¤oś╦ėøĄ─ęĢėX▀b▓┘ū„
┼c╗∙ė┌Įėė|╩Į╗“┐╔┤®┤„įOéõĄ─▀h│╠▓┘ū„▓╗═¼Ż¼╗∙ė┌¤oś╦ėøĄ─ęĢėX▀h│╠▓┘ū„Š▀ėą▀ĆįŁ╚╦¾w╦─ų½ūį╚╗▀\äėŪęŪų╚ļąį▌^ąĪĄ─ā׳cĪŻ╠žäe╩Ūßśī”Ė▀ūįė╔Č╚Ą─ÖCŲ„╩ųĄ─▀b▓┘ū„Ż¼╩╣ė├┤®┤„╩ų╠ūĄ─ĘĮĘ©▒žĒÜĖ∙ō■▓┘ū„š▀▀MąąČ©ųŲ╩ų╠ū┤¾ąĪŻ¼▓óŪę╩ų╠ū╚▌ęūė░ĒæĄ─ĻP╣Øūį╚╗▀\äėŻ¼Č°╗∙ė┌IMU╗“EMGĄ─ĘĮĘ©═©ė├ąį║═ņ`╗Ņąį▌^Ą═ĪŻę“┤╦¤oś╦ėøĄ─ęĢėXĘĮĘ©ė╚Ųõ▀mė├ė┌ņ`Ū╔╩ųĄ─▀h│╠▓┘ū„Ż¼▀@śėėą└¹ė┌▓Č½@╩ųųĖĄ─╦∙ėą▀\äėĪŻ
╗∙ė┌Ęų╬÷ęĢėXĄ─▀h│╠▓┘ū„Ęų×ķā╔ŅÉŻ║╗∙ė┌─Żą═Ą─Ż©model-Ż®ĘĮĘ©║═╗∙ė┌═Ōė^Ą─Ż©appearance-Ż®ĘĮĘ©ĪŻ╗∙ė┌─Żą═Ą─ĘĮĘ©╠ß╣®▀B└mĄ─ĮŌøQĘĮ░ĖŻ¼Ą½ėŗ╦Ń┴┐┤¾Ż¼═©│Ż╚ĪøQė┌ČÓŽÓÖCŽĄĮyĄ─┐╔ė├ąįĪŻŽÓĘ┤Ż¼╗∙ė┌═Ōė^Ą─ĘĮĘ©┐╔ęįūRäeļx╔óöĄ┴┐Ą─╩ųä▌Ż¼▀@ą®╩ųä▌═©│Żī”æ¬ė┌įōĘĮĘ©Ą─ė¢ŠÜ╝»Ż¼Č°¤oąĶĖ▀░║Ą─ėŗ╦Ń│╔▒Š║═ė▓╝■Å═ļsąįĪŻūŅĮ³Ż¼įĮüĒįĮČÓĄ─蹊┐╚╦åTų┬┴”ė┌╗∙ė┌öĄō■“īäėĄ─╗∙ė┌ęĢėXĄ─▀b▓┘ū„ĘĮĘ©Ż¼▀@ą®ĘĮĘ©╩ūŽ╚╩╣ė├╔ŅČ╚ŠĒĘe╔±ĮøŠWĮjŻ©CNNŻ®½@Ą├3D╩ųä▌╗“ūRäe╩ųä▌ŅÉäeŻ¼╚╗║¾į┘ė│╔õ╚╦Ą─ŽÓæ¬╬╗ų├ĄĮÖCŲ„╚╦╔ŽĪŻ▒╚╚ńŻ¼ŽŻ┼D┐╦└’╠ž┤¾īWAntonis ArgyrosłFĻĀ╠ß╣®┴╦╚²ĘN╗∙ė┌╔ŅČ╚ŽÓÖCĄ─╚╦¾w╬╗ū╦╣└ėŗ║═Ė·█ÖĘĮĘ©Ż¼╚╗║¾═©▀^─µ▀\äėīW▀^│╠īó╚╦¾w▀\äėė│╔õĄĮNAO╚╦ą╬ÖCŲ„╚╦Ż¼Å─Č°īŹ¼Fī”╚╦ąįÖCŲ„╚╦Ą─▓┘ū„[9]ĪŻ╚╗Č°Ż¼▀@ŅÉĮŌøQĘĮ░Ė▓╗āHę└┘ćė┌╩ųä▌╣└ėŗ╗“ĘųŅÉĄ─£╩┤_ąįŻ¼Č°Ūęį÷╝ė║¾╠Ä└ĒĄ─Ģrķg│╔▒ŠĪŻ
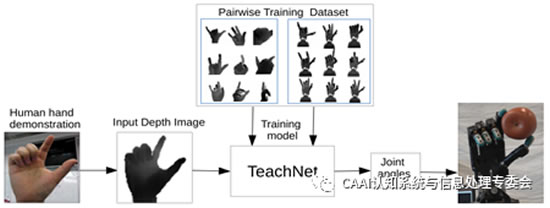
2019─ĻŻ¼Ą┬ć°Øh▒ż┤¾īWÅłĮ©éźšnŅ}ĮM║═ŪÕ╚A┤¾īWīOĖ╗┤║šnŅ}ĮM╣▓═¼╠ß│÷TeachNetŻ¼ę╗éĆų▒ĮėÅ─╚╦ŅÉ╩ųųĖ╔ŅČ╚łD½@╚ĪÖCŲ„╚╦ĻP╣ØĮŪČ╚Ą─╔ŅČ╚īW┴ĢŠWĮj[10]ĪŻ▀@ĘNĘĮĘ©ų╗ąĶ╩╣ė├ę╗éĆ╔ŅČ╚ŽÓÖCŻ¼▓óīŹ¼FČ╦ĄĮČ╦Ąž┐žųŲÖCŲ„╚╦Ż¼╩ŪĘŪ│Żų▒ė^║═ė├æ¶ėč║├Ą─▀b▓┘ū„ĘĮĘ©ĪŻTeachNetĮY║Ž┴╦ę╗éĆę╗ų┬ąįōp╩¦║»öĄconsistency lossŻ¼┐╔ęį╠Ä└Ē╚╦╩ų║═ÖCŲ„╩ųĄ─═Ōė^║═ā╚į┌ĮYśŗ▓Ņ«ÉĪŻ▀@éĆŠWĮjĄ─ė¢ŠÜę└┘ćė┌ę╗éĆ║Ž│╔Ą─400K╚╦╩ų-ÖCŲ„╩ųöĄō■╝»Ż¼Ųõųą╚╦╩ųöĄō■üĒūįė┌╚╦╩ų╬╗ū╦╔ŅČ╚łDŽ±öĄō■╝»BigHand2.0Ż¼╚╗║¾į┌Gazeboųą▓╔╝»ī”æ¬├┐éĆ╚╦╩ųĄ─Ą─ÖCŲ„╩ų╔ŅČ╚łDŽ±ĪŻūŅ║¾Ż¼ū„š▀į┌5éĆ▓╗═¼▓┘ū„š▀Ą─ūź╚ĪīŹ“×ųąūC├„┴╦TeachNetĄ─ĘĆČ©ąį║═Ė▀ą¦┬╩ĪŻĄ½╩Ū▀@ĘNĘĮĘ©āHŽ▐ė┌ÖCŲ„╩ųĄ─┐žųŲŻ¼¤oĘ©ęŲäėÖCąĄ╩ų╩╣ų«į┌┐╔▀_╣żū„┐šķgā╚▀Mąąūź╚ĪĪŻ
▀Mę╗▓ĮŻ¼2019─ĻŻ¼├└ć°NVIDIA蹊┐╦∙║═┐©├Ę┬Ī┤¾īW╣▓═¼ķ_░l┴╦ę╗ĘNĄ═│╔▒ŠĄ─╗∙ė┌ęĢėXĄ─▀h│╠▓┘ū„ŽĄĮyDexPilotŻ¼įōŽĄĮyį╩įSāHė^▓ņ┬Ń╩ųŠ═─▄═Ļ╚½┐žųŲš¹éĆ23 DOFĄ─ÖCąĄ▒█-╩ųŽĄĮy[11]ĪŻDexPilot╩╣▓┘ū„åT─▄ē“ł╠ąąĖ„ĘNÅ═ļsĄ─▓┘ū„╚╬äš╚ńöQŲ┐╔wĪó▐DĘĮēKĪóÅ─ÕXŖA╚Ī╝łÄ┼Ą╚Ż¼Č°▓╗āHāH╩Ū║åå╬Ą─ūź╚Ī║═Ę┼ų├▓┘ū„ĪŻū„š▀╩ūŽ╚╩╣ė├ę╗éĆ▓╩╔½Ą─┐Ś╬’╩ų╠ū▓╔╝»┴╦ę╗éĆ╚╦╩ųū╦ä▌Ž╚“×öĄō■╝»Ż¼╚╗║¾╩╣ė├³cįŲū„×ķ▌ö╚ļŻ¼ĮY║ŽPointNet++½@Ą├╚╦╩ų╬╗ū╦║═ĻP╣ØŽ╚“ׯ¼╚╗║¾╩╣ė├DART║═äė┴”īWųžČ©Ž“īó╚╦╩ųĻP╣ØĮŪė│╔õĄĮallegro╩ųĄ─ĻP╣Ø╔ŽĪŻūŅĮK═©▀^ā╔éĆč▌╩Šš▀═Ļ│╔Ė„ĘN╚╬䚥─╦┘Č╚║═┐╔┐┐ąįųĖś╦Ż¼“×ūC┴╦╝┤╩╣ø]ėąė|ėXĘ┤üįōŽĄĮy╚įŠ▀ėąĖ▀┐╔┐┐ąį║═Ė▀Č╚ņ`├¶ąįĪŻ
╚╗Č°╗∙ė┌ęĢėXĄ─▀b▓┘ū„ĘĮĘ©├„’@▓╗─▄▀mæ¬ė┌║┌░Ą╗“š▀╬’¾w▒╗š┌ō§Ą─ŪķørŻ¼ę“┤╦īóęĢėX┼cė|ėX/┴”Ę┤ü╚┌║ŽŻ¼īóĖ³║├ĄžīŹ¼F¶ö░¶Ą─▀b▓┘ū„╦ŃĘ©ĪŻ▒╚╚ńŻ¼į÷╝ėÖCŲ„╚╦ūź╚ĪĢrĄ─╗¼äėÖz£y║═┴”╣└ėŗŻ¼╗“š▀▓┘ū„š▀ĘŪ╩ŠĮ╠▓┐╬╗╚ńĖņ▓▓╗“ū¾╩ųė├ė┌Ėą╩▄ė|ėXĘ┤üŻ¼Å─Č°£p▌pė├æ¶Ą─┐žųŲžōō·▓ó▒▄├ŌÖCŲ„╚╦Ą─ęŌ═Ō┼÷ū▓ĪŻ┴Ēę╗ĘĮ├µŻ¼«ö╚╦╩ų▒╗š┌ō§╗“š▀ūź╬šŲõ╦¹╬’¾wĢrŻ¼╚ń║╬ĮŌøQ╚╦╩ųĮŪ╣└ėŗ╩Ū3D╚╦╩ųū╦æB╣└ėŗąĶę¬ĮŌøQĄ─ę╗éĆĘĮŽ“ĪŻį┘š▀Ż¼╗∙ė┌ęĢėXĄ─▀b▓┘ū„╩╣▓┘ū„š▀┐é╩ŪŽ▐Č©ė┌╣╠Č©Ą─ŽÓÖCŽĄĮyģ^ė“Ż¼▓╗─▄īŹ¼FęŲäė╩Į▀b▓┘ū„ĪŻ╚ń║╬īó╚╦╩ųĖ·█Ö║═╚╦╩ųĻP╣ØĮŪ╣└ėŗ╣▓═¼æ¬ė├ĄĮÖCŲ„╚╦Ą─▀b▓┘ū„ųąę▓╩ŪĘŪ│Żėą╚żĪŻ
 |
| ╔╠ė├ÖCŲ„╚╦ Disinfection Robot š╣ÅdÖCŲ„╚╦ ųŪ─▄└¼╗°šŠ ▌å╩ĮÖCŲ„╚╦Ąū▒P ėŁ┘eÖCŲ„╚╦ ęŲäėÖCŲ„╚╦Ąū▒P ųvĮŌÖCŲ„╚╦ ūŽ═ŌŠĆŽ¹ČŠÖCŲ„╚╦ ┤¾Ų┴ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖCŲ„╚╦ Ę■äšÖCŲ„╚╦Ąū▒P ųŪ─▄╦═▓═ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖC ÖCŲ„╚╦OEM┤·╣żÅS Ž¹ČŠÖCŲ„╚╦┼┼├¹ ųŪ─▄┼õ╦═ÖCŲ„╚╦ łDĢ°^ÖCŲ„╚╦ ī¦ę²ÖCŲ„╚╦ ęŲäėŽ¹ČŠÖCŲ„╚╦ ī¦į\ÖCŲ„╚╦ ėŁ┘eĮė┤²ÖCŲ„╚╦ Ū░┼_ÖCŲ„╚╦ ī¦ė[ÖCŲ„╚╦ ŠŲĄĻ╦═╬’ÖCŲ„╚╦ įŲ█E┐Ų╝╝ØÖÖCŲ„╚╦ įŲ█EŠŲĄĻÖCŲ„╚╦ ųŪ─▄ī¦į\ÖCŲ„╚╦ |



