
| 創(chuàng)澤機(jī)器人 |
| CHUANGZE ROBOT |
| 創(chuàng)澤機(jī)器人 |
| CHUANGZE ROBOT |
機(jī)器人底盤是機(jī)器人實(shí)現(xiàn)運(yùn)動(dòng)的重要環(huán)節(jié),不僅融合了多種傳感器,還結(jié)合了SLAM算法等核心技術(shù)。
對(duì)創(chuàng)澤機(jī)器人底盤來說,其融合了激光雷達(dá)、深度攝像頭、超聲波及防跌落等多個(gè)傳感器,并結(jié)合了自主研發(fā)的高性能SLAM算法。使其擁有可靠、易用的定位導(dǎo)航方案,即使面對(duì)各類復(fù)雜環(huán)境,它也能做到自主路徑規(guī)劃及障礙物規(guī)避等功能。
如此重要的機(jī)器人底盤,它究竟由哪些核心技術(shù)組成呢?
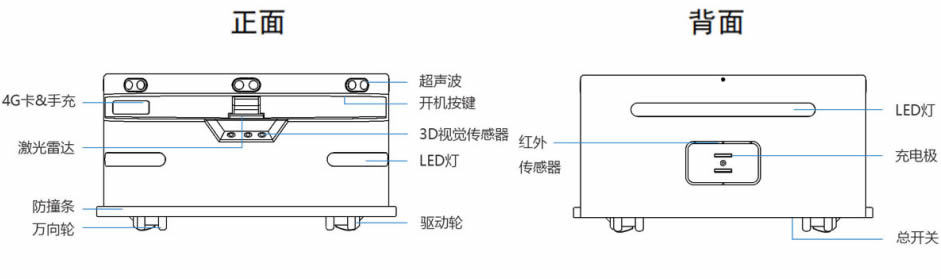
激光雷達(dá)傳感器: 利用激光雷達(dá)傳感器可時(shí)刻掃描周圍環(huán)境,提供地圖數(shù)據(jù),構(gòu)建精度高達(dá)5cm的地圖,并基于該地圖數(shù)據(jù)實(shí)現(xiàn)自主路徑規(guī)劃及導(dǎo)航功能;
深度攝像頭傳感器: 深度攝像頭傳感器可偵測(cè)到位于雷達(dá)掃描平面上方的障礙物,并及時(shí)發(fā)送信號(hào)進(jìn)行規(guī)避;
超聲波傳感器: 超聲波傳感器在工作時(shí),能精準(zhǔn)探測(cè)到玻璃、鏡面等高透材質(zhì)障礙物,從而在靠近這些物體前能及時(shí)避讓;
防跌落傳感器: 防跌落傳感器可幫助機(jī)器人 360°偵查周圍的工作環(huán)境,判斷工作區(qū)域是否存在邊界、臺(tái)階、坡度等情況,從而發(fā)送請(qǐng)求信號(hào),避免跌落;
模塊化定位導(dǎo)航系統(tǒng): 模塊化定位導(dǎo)航系統(tǒng)內(nèi)置SLAM引擎的導(dǎo)航定位核心模塊,高度集成,無需借助外部運(yùn)算資源,可直接輸出機(jī)器人所在環(huán)境地圖、定位坐標(biāo)姿態(tài),內(nèi)置多種機(jī)器人運(yùn)動(dòng)控制算法,可提供厘米級(jí)別的定位和地圖精度,在未知環(huán)境中實(shí)時(shí)規(guī)劃路徑,并進(jìn)行障礙物規(guī)避導(dǎo)航,自主尋找最短路徑。

在機(jī)器人底盤結(jié)構(gòu)除了使其擁有自主定位導(dǎo)航及路徑規(guī)劃功能,自主回充技術(shù)也是不可或缺的,而Ark采用的自主回充技術(shù),可外部調(diào)度預(yù)約充電。當(dāng)電量較低時(shí),會(huì)自主返回充電塢充電,在負(fù)載情況下可實(shí)現(xiàn)15小時(shí)連續(xù)不間斷工作,給應(yīng)用現(xiàn)場(chǎng)提供穩(wěn)定可靠的表現(xiàn)。
同時(shí)開放軟硬件接口,支持多平臺(tái)操作,方便用戶快速切換 ,完全開放的用戶接口,包括以太網(wǎng)、控制接口,電源等擴(kuò)展接口,90%的接口定義均相同,可方便用戶快速切換。
 |
| 機(jī)器人招商 Disinfection Robot 機(jī)器人公司 機(jī)器人應(yīng)用 智能醫(yī)療 物聯(lián)網(wǎng) 機(jī)器人排名 機(jī)器人企業(yè) 機(jī)器人政策 教育機(jī)器人 迎賓機(jī)器人 機(jī)器人開發(fā) 獨(dú)角獸 消毒機(jī)器人品牌 消毒機(jī)器人 合理用藥 地圖 |



