
| 創(chuàng)澤機(jī)器人 |
| CHUANGZE ROBOT |
| 創(chuàng)澤機(jī)器人 |
| CHUANGZE ROBOT |
建立坐標(biāo)系:如圖 2.1所示,建立以機(jī)器人幾何中心(AC與DB的交點(diǎn))為原點(diǎn)的CENTER坐標(biāo)系,機(jī)器人前向運(yùn)動方向?yàn)閤軸正方向(紅色箭頭),與之垂直向左為y軸正方向(綠色箭頭),z軸垂直于紙面向外,滿足右手定則。
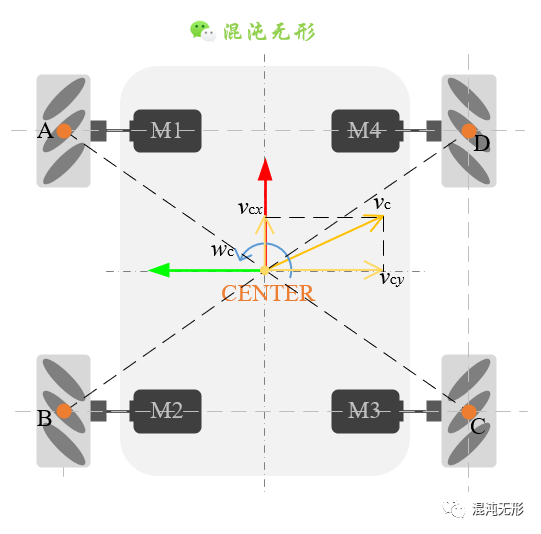
圖 2.1 “內(nèi)八”構(gòu)型麥輪平臺坐標(biāo)系示意圖
麥輪平臺是全向移動機(jī)器人的原因是其有三個(gè)自由度,意味著可以在平面內(nèi)做出任意方向平移同時(shí)自旋的動作,如圖 2.1所示,采用任意方向的線速度及角速度[vc w]T來描述CENTER的速度,而vc可沿著坐標(biāo)軸分解為兩個(gè)分速度,表示為[vcx vcy w]T。
其線速度[vcx vcy]T方向?yàn)檠刂鴺?biāo)軸正方向則為正,反方向?yàn)樨?fù);而機(jī)器人逆時(shí)針旋轉(zhuǎn)的時(shí)候,角速度w為正,反之為負(fù)。(定義方式與《兩輪差速驅(qū)動機(jī)器人運(yùn)動模型及應(yīng)用分析》中的相似)
在對麥輪平臺運(yùn)動規(guī)律分析之前需要做兩個(gè)基本假設(shè):①麥輪平臺運(yùn)動過程中,輪子不會懸空而發(fā)生空轉(zhuǎn)現(xiàn)象;②麥輪平臺質(zhì)量分布均勻,且質(zhì)心位置在點(diǎn)CENTER處,以保證四個(gè)輪子在地面接觸點(diǎn)受到的支撐力相同,確保四個(gè)等轉(zhuǎn)速的輪子受到地面作用的摩擦力大小相同。
基于上述假設(shè)條件,并按照一定規(guī)律聯(lián)合控制四個(gè)輪子等速轉(zhuǎn)動,便可實(shí)現(xiàn)。這是因?yàn)檩嗇炤S與輥?zhàn)愚D(zhuǎn)軸夾角呈45度,如圖 1.2(c)所示,沿輥?zhàn)虞S線的靜摩擦力可沿著輪轂軸向和徑向分解,進(jìn)一步遷移至圖 1.4分析,只有當(dāng)輪轂軸與輥?zhàn)愚D(zhuǎn)軸夾角呈45度時(shí),才能保證左右和前后對稱位置的(等速)麥輪在輪轂軸向及徑向上的分力可以恰好相互抵消,進(jìn)而形成合力而運(yùn)動。
要滿足上述的分力能夠相互抵消的條件是麥輪(或電機(jī))轉(zhuǎn)速大小相同,因?yàn)槊總€(gè)麥輪受到的地面支持力相同(基于假設(shè)①②),4個(gè)電機(jī)又勻速等速轉(zhuǎn)動,意味著電機(jī)輸出扭矩與地面作用于麥輪的摩擦力是平衡的,4個(gè)麥輪摩擦力在輪轂軸向和徑向上分解的大小是相同的,而速度分解與力分解類似,所以4個(gè)麥輪沿輪轂軸向和徑向的分速度大小是相同的。

 |
| 機(jī)器人招商 Disinfection Robot 機(jī)器人公司 機(jī)器人應(yīng)用 智能醫(yī)療 物聯(lián)網(wǎng) 機(jī)器人排名 機(jī)器人企業(yè) 機(jī)器人政策 教育機(jī)器人 迎賓機(jī)器人 機(jī)器人開發(fā) 獨(dú)角獸 消毒機(jī)器人品牌 消毒機(jī)器人 合理用藥 地圖 |



